
A robotic is a machine which responds to instructions. These instructions are programmed by the person to attain a particular activity. Robots are made by actuators, motors and sensors and a management system which comprises a microcontroller. The robotic we’re going to make is a straightforward rover made by two DC motors which may go ahead, backward, flip proper or left by giving instructions from a smartphone. The wi-fi know-how we’re utilizing right here is Bluetooth low power (BLE) which comes built-in with the �seeed studio BLE sense� board. BLE consumes much less energy as in comparison with customary Bluetooth module HC-05. So lets get began with the undertaking.
Parts required
- Seeed studio xiao nrf52840 sense
- L293D motor driver
- Robotic automobile chassis (with two DC motors)
- USB C kind cable
- Jumper wires
- Battery holder of 4 cells
- AA batteries � 4pcs
As soon as we obtained all the mandatory elements together with correct robotic chassis equipment. Now we’re able to make the {hardware} connections. Join the elements in accordance with under given circuit diagram.

{kind=link}
Working of L293D motor driver
The L293D motor driver is the best choice on the subject of controlling DC motors. It has built-in twin H-bridge. Utilizing only one single driver we will management 2 motors. It has 4 outputs M1, M2, M3 and M4. One motor is linked to M1 and M2 and one other is linked to M3 and M4. It additionally has 4 inputs to regulate the path of motor IN1, IN2, IN3 and IN4. Giving HIGH to IN1 and LOW to IN2 causes the best wheel to maneuver ahead. In related manner if we reverse the order and provides LOW to IN1 and HIGH to IN2 causes the best wheel to maneuver backward. Similar goes for controlling the left wheel simply the inputs are IN3 and IN4.
Making the seeed studio boards suitable with Arduino IDE.
Earlier than importing the code we have to add the seeed studio boards suitable with Arduino IDE.
Step 1 – Copy the under given hyperlink.
https://recordsdata.seeedstudio.com/arduino/package_seeeduino_boards_index.json�
Step 2 � Open Arduino IDE >> file >> preferences

Step 3- Paste the hyperlink in �Further Boards Supervisor URL�s�. If there are different hyperlinks then you’ll be able to separate the hyperlinks with comma. Then click on on �okay�. The boards at the moment are added to the board supervisor.
Step 4-� Open �board supervisor� and seek for key phrase �seeed nrf52�. One can find two board libraries. Set up each of them.

Now that each one seeed studio boards are added to the Arduino IDE, we will choose our board and add program to it.
Including the ArduinoBLE library
Step 1 � Click on right here. The library zip folder will probably be downloaded
Step2 � Go to sketch >> embrace library >> add .zip library. Then browse to the situation the place the zip folder is downloaded. Open the zip folder and the library will probably be put in.
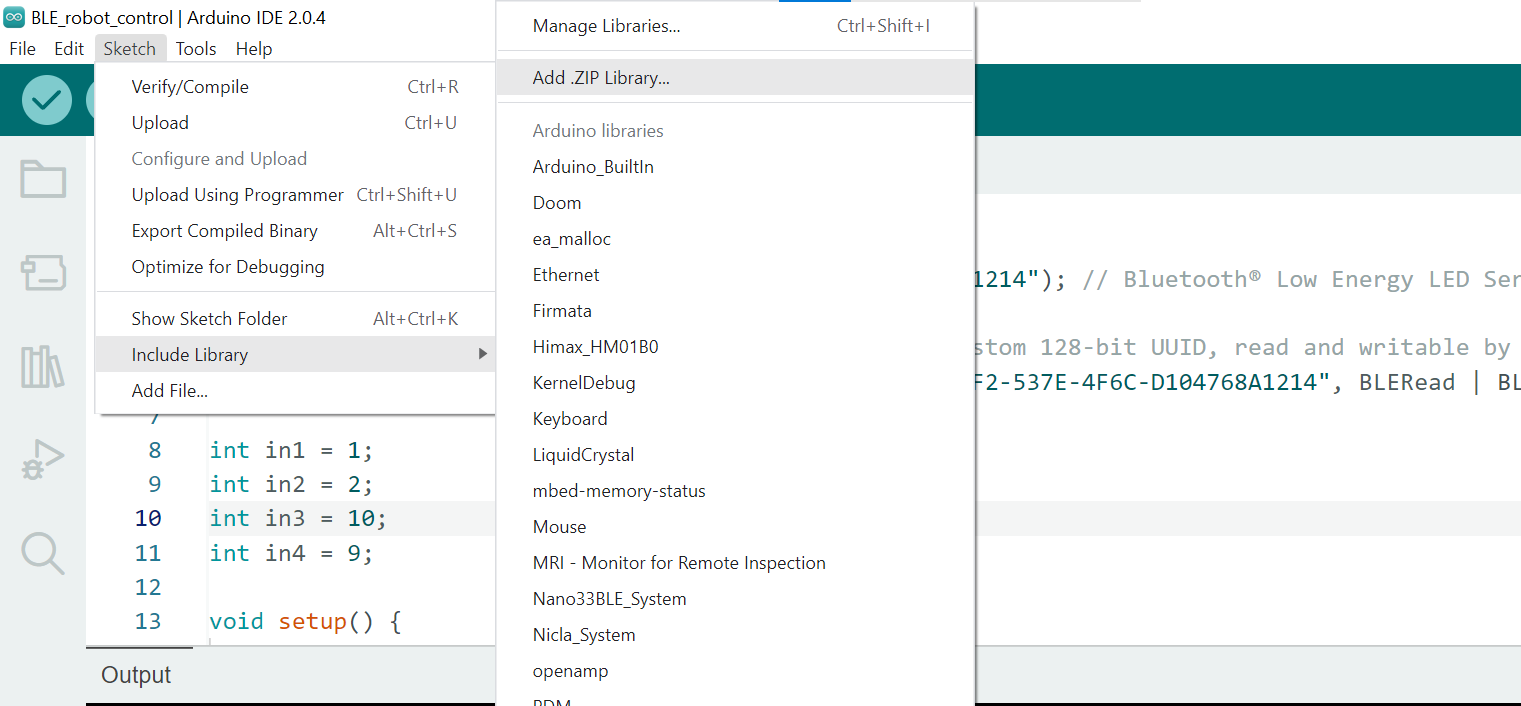
The �ArduinoBLE.h� library is now put in. Now we will add the code to the �seeed studio sense board�.
Choosing the board and port earlier than importing.
Go to instruments >> boards >> �Seeed nrf mbed enabled boards� >> choose the �seeed xiao BLE sense� board.

Go to instruments >> port >> choose the correct com port >> copy the under given code and paste it >> hit add button.
Code
#embrace <ArduinoBLE.h>
BLEService ledService("19B10000-E8F2-537E-4F6C-D104768A1214"); // Bluetooth� Low Vitality LED Service
// Bluetooth� Low Vitality LED Swap Attribute - customized 128-bit UUID, learn and writable by central
BLEByteCharacteristic switchCharacteristic("19B10001-E8F2-537E-4F6C-D104768A1214", BLERead | BLEWrite);
�
int in1 = 1;
int in2 = 2;
int in3 = 10;
int in4 = 9;
�
void setup() {
� Serial.start(9600);
� whereas (!Serial);
�
� // set LED pin to output mode
pinMode(LEDR,OUTPUT);
pinMode(LEDG,OUTPUT);
pinMode(LEDB,OUTPUT);
�
digitalWrite(LEDR,HIGH); //flip off all of the led's
digitalWrite(LEDG,HIGH);
digitalWrite(LEDB,HIGH);
�
� // start initialization
� if (!BLE.start()) {
� � Serial.println("beginning Bluetooth� Low Vitality module failed!");
� � whereas (1);
� }
�
� // set marketed native title and repair UUID:
� BLE.setLocalName("Robubot"); �// You possibly can change this. Give any title to your bluetooth gadget.
� BLE.setAdvertisedService(ledService);
�
� // add the attribute to the service
� ledService.addCharacteristic(switchCharacteristic);
�
� // add service
� BLE.addService(ledService);
�
� // set the preliminary worth for the characeristic:
� switchCharacteristic.writeValue(0);
�
� // begin promoting
� BLE.promote();
�
� Serial.println("BLE managed robotic");
}
�
void loop() {
� // hear for Bluetooth� Low Vitality peripherals to attach:
� BLEDevice central = BLE.central();
�
� // if a central is linked to peripheral:
� if (central) {
� � Serial.print("Related to central: ");
� � // print the central's MAC handle:
� � Serial.println(central.handle());
�
� � // whereas the central continues to be linked to peripheral:
� whereas (central.linked()) {
� � � � Serial.println(switchCharacteristic.worth());
� � � � if (switchCharacteristic.written()) {
� � � � � if (switchCharacteristic.worth()==102) //ahead 'f'
� � � � � { �
� � � � � � Serial.println("Ahead");
� � � � � � digitalWrite(LEDG, LOW); // modified from HIGH to LOW � �
� � � � � � digitalWrite(LEDR, HIGH);
� � � � � � digitalWrite(LEDB, HIGH);
�
� � � � � � digitalWrite(in1,HIGH); �//left wheel ahead
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,HIGH); //proper wheel ahead
� � � � � � digitalWrite(in4,LOW);
�
� � � � � � delay(1500);
�
� � � � � � digitalWrite(in1,LOW); �//cease
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW);
� � � � � � digitalWrite(in4,LOW);
�
� � � � � }
� � � � � �if (switchCharacteristic.worth()==98) //backward
� � � � � �{ � � � � � � � � � � � � � � �
� � � � � � Serial.println(F("Backward"));
� � � � � � digitalWrite(LEDR, LOW); // modified from LOW to HIGH �
� � � � � � digitalWrite(LEDG, HIGH);
� � � � � � digitalWrite(LEDB, HIGH);
�
� � � � � � digitalWrite(in1,LOW); �//left wheel backward
� � � � � � digitalWrite(in2,HIGH);
� � � � � � digitalWrite(in3,LOW); //proper wheel backward
� � � � � � digitalWrite(in4,HIGH);
�
� � � � � � delay(1500);
�
� � � � � � digitalWrite(in1,LOW); �//cease
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW);
� � � � � � digitalWrite(in4,LOW);
�
� � � � � }
� � � � � �if (switchCharacteristic.worth()==108) //left
� � � � � �{ � � � � � � � � � � � � � � �
� � � � � � Serial.println(F("left"));
� � � � � � digitalWrite(LEDB, LOW); // modified from LOW to HIGH �
� � � � � � digitalWrite(LEDR, HIGH);
� � � � � � digitalWrite(LEDG,HIGH); �
�
� � � � � � digitalWrite(in1,LOW); �//left wheel backward
� � � � � � digitalWrite(in2,HIGH);
� � � � � � digitalWrite(in3,HIGH); //proper wheel ahead
� � � � � � digitalWrite(in4,LOW);
�
� � � � � � delay(250);
�
� � � � � � digitalWrite(in1,LOW); �//cease
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW);
� � � � � � digitalWrite(in4,LOW);
�
� � � � � }
� � � � � if (switchCharacteristic.worth()==114) //proper
� � � � � �{ � � � � � � � � � � � � � � �
� � � � � � Serial.println(F("proper"));
� � � � � � digitalWrite(LEDR, LOW); // modified from LOW to HIGH
� � � � � � digitalWrite(LEDG, LOW);
� � � � � � digitalWrite(LEDB, HIGH); �
�
� � � � � � digitalWrite(in1,HIGH); �//left wheel ahead
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW); //proper wheel backward
� � � � � � digitalWrite(in4,HIGH);
�
� � � � � � delay(250);
�
� � � � � � digitalWrite(in1,LOW); �//cease
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW);
� � � � � � digitalWrite(in4,LOW);
� � � � � }
� � � � � �if (switchCharacteristic.worth()==115) //cease
� � � � � �{ � � � � � � � � � � � � � � �
� � � � � � Serial.println(F("cease")); �
� � � � � � digitalWrite(LEDR,HIGH); // modified from LOW to HIGH
� � � � � � digitalWrite(LEDG,HIGH);
� � � � � � digitalWrite(LEDB,HIGH);
�
� � � � � � digitalWrite(in1,LOW); �//cease
� � � � � � digitalWrite(in2,LOW);
� � � � � � digitalWrite(in3,LOW);
� � � � � � digitalWrite(in4,LOW);
� � � � � }
� � � � }
� � � }
�
� � // when the central disconnects, print it out:
� � Serial.print(F("Disconnected from central: "));
� � Serial.println(central.handle());
� }
}
�
Sending instructions from cellular app to Xiao BLE sense board.
After the code is uploaded, open the serial monitor. If it reveals the message �BLE managed robotic� then solely the board will probably be detected by the cellular app. So make it possible for the message �BLE managed robotic� is printed or else it could not work.
Step 1 – Obtain the �nRF join� app. It�s free on playstore.
Step 2 � Activate the Bluetooth of your cellular and open the app.
Step 3 � The scanning will begin and your gadget title will seem. In my case it�s �Robubot�. Hook up with your gadget. After connecting the default worth �0� will begin printing on the serial monitor.
Step 4 � choose �Unknown Service� >> Choose the up arrow to write down knowledge. >> Within the write worth choose textual content >> ship a personality � f � for ahead >>� Refresh the serial monitor. You will notice 102 getting printed on the serial monitor. In related manner we get the code for �b� – backward, �l� � left and �r� � proper.


We use these codes in our program. When a personality is shipped from the applying and it�s code matches the code in �if� situation assertion then instructions are despatched to the motor driver to maneuver it ahead, backward, left or proper.
Energy the board together with your battery pack and disconnect the USB cable. Now you’re prepared to regulate the robotic wirelessly.
Conclusion
On this manner we made a smartphone managed robotic utilizing BLE know-how. The robotic responds to instructions given by the smartphone app. You probably have any doubt concerning any a part of this weblog then be happy to say it within the feedback, our workforce will probably be there to help you.
For extra fascinating digital initiatives try our YouTube channel.